MEMSマイクロフォンアレイのご紹介
マイクロフォンは、音声サウンドを電気信号に変換するさまざまなアプリケーションで使用されます。全方向性を特徴とするMEMSマイクロフォンは、あらゆる方向からの音を一様に拾います。残念ながら、電気信号に変換された音は、目的の音以外にも不要なノイズまで含まれてしまうことがたびたびあります。結果として、検出される音の品質を改善するために、MEMSマイクロフォンのアレイとその関連電子機器を採用することになります。これらのアレイは、ビーム形成としても知られている指向性応答を生成するように設計されており、これが不要なノイズを除去して、より望ましい方向からの音を処理します。このブログ記事では、動作原理、一般構成、通常のアプリケーションなどを含む、MEMSマイクロフォンアレイの基礎について学びます。
MEMSマイクロフォンアレイの概要
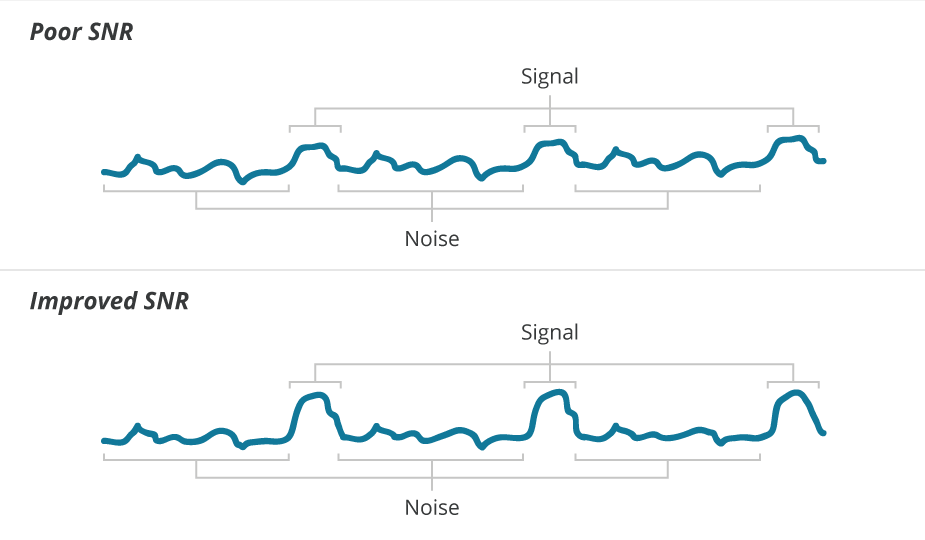
目的の音(シグナル)と不要な音(ノイズ)の比は、シグナルノイズ比(SNR)と呼ばれています。MEMSマイクロフォンアレイは、目的の音を強調して不要な音を低減することができるため、システムのSNRを向上します。
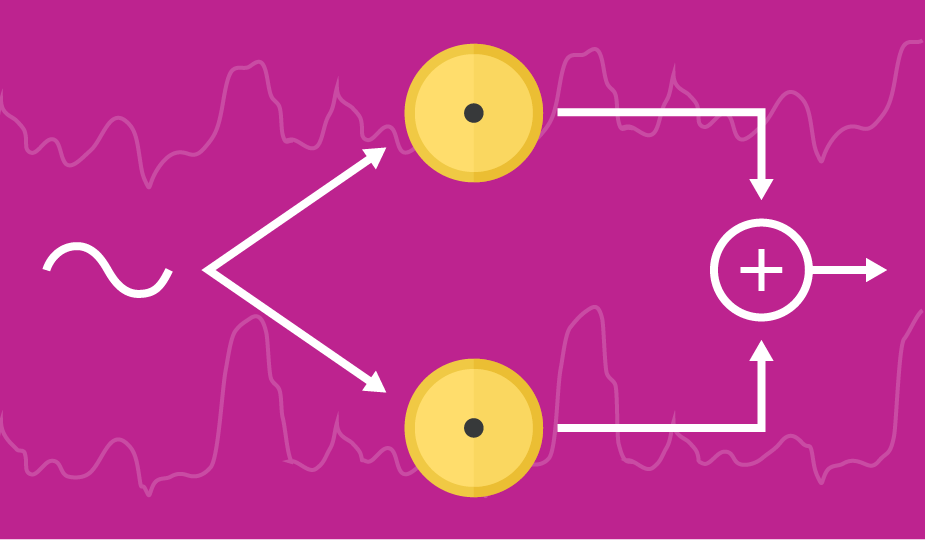
MEMSマイクロフォンアレイの構成では、音声サウンドの収集に2つ以上のマイクロフォンが使用されており、各マイクロフォンからの電気信号が結成されて、最終的な電気信号が生成されます。信号の結合前の各マイクロフォン(アンプ、遅延、フィルタなど)からの信号処理には、電子回路が使用されています。この電気的処理の結果、目的のシグナルが強調され、不要なシグナルは減衰されます。この信号処理を効率的におこなうには、アレイに採用されているマイクロフォンは、正確に一致した性能仕様を持つか、あるいは仕様性能に対して個々にキャラクタリゼーションされている必要があります。マイクロフォンの感度は、アレイ内のマッチングを良くするために必要な重要なパラメータです。半導体製造技術のお蔭で、ぴったりと一致した感度交差持つMEMSマイクロフォンも簡単に入手でき、これはマイクロフォンアレイに対しても最適な選択肢となっています。
ブロードサイド型マイクロフォンアレイ
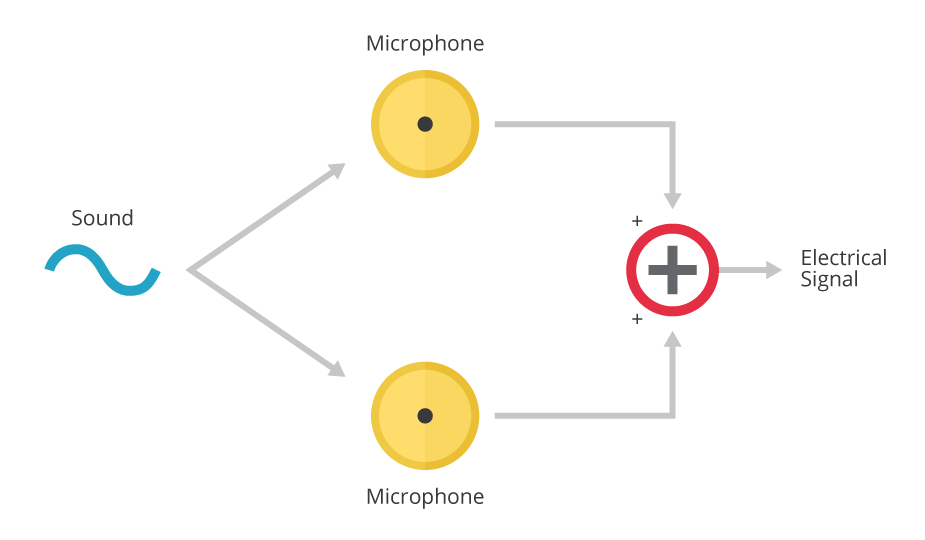
多くのマイクロフォンアプリケーションは、目的の音に対して特定の音源を持っています。従って、その方向から音を「聴く」こと、そして、その他の方向からの音を「無視する」ことで、システムのSNRを改善することができます。ブロードサイド型マイクロフォンアレイは、目的音源に対して垂直に設置されたマイクロフォンの1Dあるいは2Dアレイです。各マイクロフォンからのシグナルを加算して目的の電気信号を産生します。アレイに対して垂直方向から発生する音はマイクロフォンに同時に到達し、これが電気的処理で建設的に加算されます。アレイに対して垂直ではない方向から発する音は、異なる遅延時間を経てマイクロフォンに到着します。一般的に異なる遅延時間を持つシグナルは「きれいに」加算されず、低レベルの電気シグナルを産生します。
コンピュータのモニターやTV画面への音声インターフェースは、ブロードサイド型マイクロフォンアレイのアプリケーションの好例です。ユーザは画面の直接前にいることから、アレイはディスプレイ画面と同じ平面に構築されています。さらに、アレイは既存のディスプレイの物理的な深さの範囲内で実装することができます。
エンドファイア型マイクロフォンアレイ
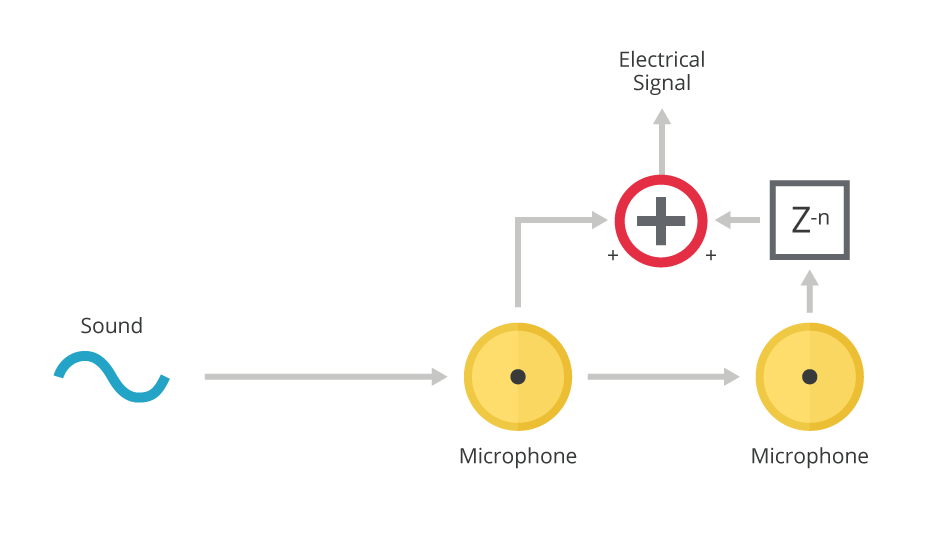
エンドファイア型マイクロフォンアレイは、目的の音源の方向にマイクロフォン列を配置する構造で、ここでは目的の音は異なる時間遅延にて各マイクロフォンに到達します。各マイクロフォンの処理回路は電気的遅延時間を採用することで、マイクロフォンの音声遅延時間を補正することができます。エンドファイア型マイクロフォンアレイは、目的の方向からのシグナルが建設的な方法で合計されるブロードサイド型マイクロフォンアレイと似ていますが、目的の方向以外の方向からのシグナルはより低い値に合計されます。
ブロードサイド型マイクロフォンアレイとエンドファイア型マイクロフォンアレイは両方とも目的の軸に沿って音のキャプチャを強化し、その他のノイズ音を減衰します。ブロードサイド型マイクロフォンアレイはマイクロフォンアレイの前後両方で音を同等にキャプチャします。エンドファイア型アレイはアレイ前方の音のみをキャプチャし、アレイ後方と他のすべての方向からのノイズを減衰します。またエンドファイア型は、目的の音の方向に物理的に向いていなければなりません。ハンドヘルド型マイクロフォンは、このトポロジーに対して優れたアプリケーションと言えます。このデバイスは、話をしている(または歌っている)人の方へ直接向いて、そのシグナルだけを直接キャプチャすることができます。
その他のMEMSマイクロフォンアレイのアプリケーション
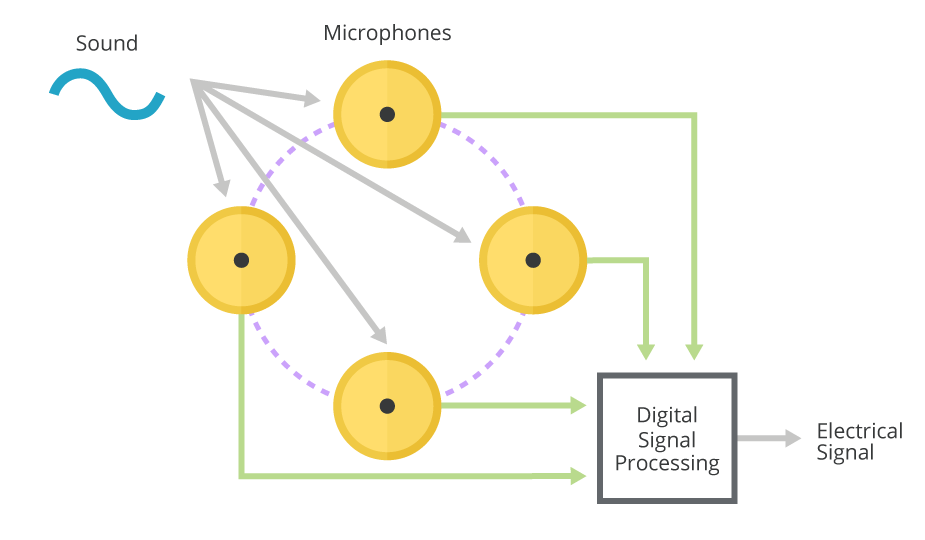
MEMSマイクロフォンアレイは、アレイに対する音の方向を特定するためにも使用することができます。このアプリケーションの一般的な実装例では、マイクロフォンは円または球の周囲に配置されます。各マイクロフォンからの目的シグナルの識別には電気信号処理が使用され、各マイクロフォン同士の間の目的シグナル間の相対遅延時間を使用してマイクロフォンアレイに対する音源を特定します。
音声位置マイクロフォンアレイの一般的な用途としては、警察や軍での銃声検出があります。マイクロフォンアレイに携わるデジタル信号処理(DSP)回路は、その他のノイズから銃声を区別して、その後その銃声がどこから発射されたのか、方向を特定することができます。
結論
MEMSマイクロフォンと関連電気回路のアレイは音のモニタリング強化のために使用することができます。一般消費者向け家電のアプリケーションでは、通常、最終価格により2~10個のマイクロフォンで設計がおこなわれています。性能が主に重要な場合は、300個以上のマイクロフォンを組み合わせたアレイを使用して、音声スペクトル全域に渡り、3Dの厳しい空間分解能を提供することができます。これらのマイクロフォンアレイは、セキュリティ検出や監視のようなアプリケーションで使用されています。ただし、マイクロフォンアレイの実装には、特性がよくマッチングしたマイクロフォンが必要です。このような理由から、低価格かつ厳密な感度耐性を備えたMEMSマイクロフォンは、マイクロフォンアレイアプリケーションの設計者にとって最適な選択肢です。
 タグ:
タグ:
その他のリソース