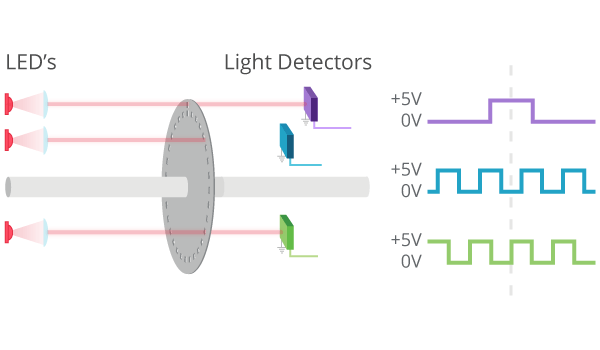
光学式エンコーダーでは、非常に小さいLEDを使用して、特定の間隔で、ディスクのノッチから光を通します。これらの間隔は、エンコーダーの分解能によって決まります。光がノッチを通過すると、受光器は信号を受信し、その信号を位置データとして送信します。
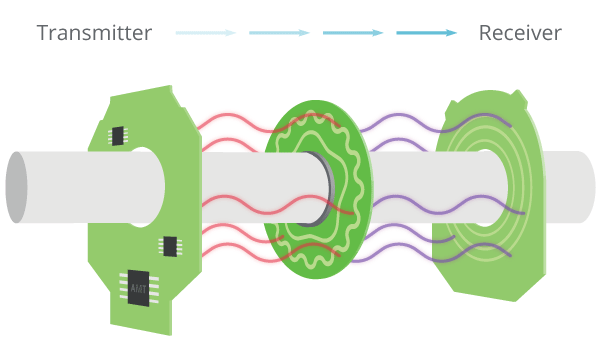
AMTエンコーダーの説明も似ていますが、LEDを通して光を送信するのではなく、電場を送ります。光学式ディスクの代わりとなるのは、電場を変調する金属トレース正弦波パターンが含まれるPCBローターです。変調信号の受信先は、専用ASICを介してトランスミッタに戻され、ここで元の信号と比較されます。MCUが搭載された多くのAMT製品において、ASICの性能はさらに向上しています。この設計により、AMT静電容量式エンコーダーでは、市販されている他のエンコーダーと比較して、はるかに高範囲の精度と柔軟性が得られます。ローターPCBは、高い位置分解能を実現するように設計されています。この高いベース分解能により、ASICおよびMCUは、お客様がソリューションとして選択する広範な最終分解能を計算的に引き出すことができます。分解能の選択はASICおよびMCUで行われるため、多くの分解能がある製品でありながら、購入は1つの部品番号のみで済みます。
インクリメンタルAMT静電容量式エンコーダーの出力波形には、光学式エンコーダーと同じ特性を持つため、移行はシームレスです。各インクリメンタルAMTエンコーダーには、インデックス・パルスに加えて、直角位相A/B信号があります。これらは、回転の方向を示すために90°Ⅴ位相がずれた5ボルト論理波形です。
実際に、AMT静電容量式エンコーダーは、光学式エンコーダーよりも、必要な外部回路がさらに少なくて済む場合があります。多くのエンコーダーは、出力トランジスタのコレクタを浮遊させる(HIGHでもLOWでもない)オープン・コレクタ出力を使用します。エンコーダーを動作させるには、プルアップ抵抗器で信号を供給電圧に引き上げる必要があります。その後、アクティブ出力が信号を引き下げて出力パルスのオンとオフを切り替え、期待する方形波を生成します。すべてのAMT静電容量式エンコーダーは、期待する方形波の生成に外部回路が不要な、CMOSプッシュ・プル・ドライブを採用しています。CMOS駆動出力のさらなる利点として、入力との互換性があります。
一般的なエンコーダー出力についての詳細情報は、CUI Devicesのブログ掲載記事をご覧ください。
弊社では、ブラシレスDCモータ用標準インクリメント・エンコーダー、アブソリュート・エンコーダー、およびコミュテーション・エンコーダーをご用意しています。CUI DevicesのAMTエンコーダーは、放射状と軸上の構成があり、以下を含むさまざまな出力シグナルタイプがあります:シングルエンド出力、差動ラインドライバー、SSI、SPI、RS-485など。つまり、AMTエンコーダーラインには、ほぼすべてのアプリケーションのニーズを満たすさまざまなオプションが搭載されています。
AMTエンコーダー・シリーズは、この基盤技術のため、非常に堅牢です。光学式エンコーダーには、耐久性と耐用年数の2つの主な欠点があります。光学式ディスクは、通常はガラス製であるため非常に慎重に扱う必要があり、衝撃や振動に対する耐久性はあまり優れていません。また、汚れや粒子状物質がディスクに付着して光信号を妨害すると、信号の質が損なわれます。さらに、光学式エンコーダー内部のLEDは、長期間にわたる消耗の影響を受けやすいのです。
AMTエンコーダーには、これらの問題がありません。容量技術を採用しているため、LEDや見通し線は必要ありません。PCBローターが自由に回転できる限り、中間にある非導電粒子状物質の問題とは関係なく、送信側から受信側へ電場が渡されます。つまり、産業環境にある埃、塵、汚れなどのどんなものでも、AMTエンコーダーへの影響はありません。
光学式エンコーダーで使用されるガラス製ディスクの必要性がないため、AMTエンコーダーは非常に耐久性があります。ただし、落下、振動、または衝撃については効果が減少します。衝撃および振動試験の詳細については、AMTデータシートを参照してください。
AMTエンコーダーには摩耗するコンポーネントがありません。つまり、回転数に限界はないということです。
AMTエンコーダーをギヤ油などの非導電性の液体に入れた場合でも、同様に動作します。光学式エンコーダーの場合は、光が送信側から受信側へ送られる際に遮られたり歪んだりするため、油の中では動作しません。この問題は、光学式エンコーダーの見通し線の要件のためです。AMT静電容量式エンコーダーは、見通し線光学を使用せずに電磁場に依存しているため、ユニット全体をオイルでシールする必要があるモータまたはギアアセンブリに最適です。多くの光学式エンコーダーの製造メーカーは、オイルがエンコーダーに侵入するのを防ぐため、シャフト・シールを提供しています。しかし、この解決策により、長期間にわたる摩耗による別の障害が発生する場合があります。
すべてのAMTエンコーダーは静電容量式ASICを使用して、エンコーダー内部の基本正弦波パターンに基づいてさまざまな出力分解能を生成します。この正弦波パターンの数を変更することで、異なる分解能のセットを生成することができます。AMT10E シリーズは、既存のAMT10シリーズパッケージを採用していますが、正弦波パターンの数が異なります。このパターン数は、2.5倍も増加しており、その影響で各分解能も2.5倍増大しています。この高分解能のセットを得る代わりに生じるデメリットとして、最大RPMの制限が2.5倍減少します。このAMT10エンコーダーの拡張型バージョンは、1250 PPR、2500 PPR、5120 PPRなどの標準バージョンでは不可能な分解能を提供します。
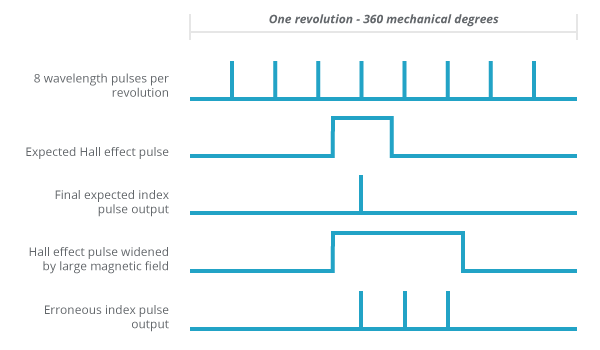
AMT10シリーズとAMT10Eシリーズエンコーダーでは、すべてのAMT製品で使用可能な同じ専有ASICを使用していますが、絶対位置の追跡はどのような種類のMCUでもサポートされていません。絶対位置の追跡が不可能であることを埋め合わせるには、ホール効果センサを使用して、エンコーダーのインデックス・パルスを生成します。ホール効果センサを使用しなければ、エンコーダーは、1回転あたり8インデックス・パルスを出力するでしょう。これは、エンコーダーのローターボード上に描かれた正弦波形によるもので、AMT10では8波長またはラムダ(λ)、AMT10Eでは20ラムダあります。このエンコーダーは両方とも、1回転あたり多数のサイクルまたはラムダを持つ静電容量式センサに基づいて回転動作を解釈します。インデックスパルスを生成するには、ホール効果信号をそれに最も近い波長パルスにゲート制御して、インデックスパルスをラムダあたり1回ではなく、1回転あたり1回生成します。
エンコーダーを強力な浮遊磁束を持つモータに実装すると、インデックス・パルスの品質が損なわれる場合があります。強力な磁界がモータ(通常はステッパ・モータ)で40ガウスを超えると、ホール効果センサに影響する場合があります。これは、8波長パルスのゲート制御に影響し、また、回転あたりのインデックス・パルスが予期した数よりも多かったり少なかったりする場合があります。
この場合は、電磁ホール効果センサなしで、AMT10またはAMT10Eシリーズのエンコーダーを購入していただけます。この構成では、上記のような、ホール効果センサのゲート制御がないため、エンコーダーからのインデックス出力は1回転あたり8回発生します。AMT10またはAMT10Eシリーズの代わりとして、次世代AMT11シリーズのインクリメントエンコーダーは、オンボードMCUを利用してインデックスパルスを生成します。これには、あらゆる角度位置でインデックスパルスをゼロ設定できるという追加のメリットがあります。
アプリケーションによっては、ケーブルを介してノイズがAMTエンコーダーに漏れる場合があります。このノイズに対処するには、すべての場所で適切な接地を確実に行う必要があります。ノイズが漏れる場合は、シールド・ケーブルの使用をお勧めします。ケーブルのシールドは、ドライバー・エンドで接地できます。エンコーダーのグランドは、分岐して、モータ・エンドで接地できます。モータのシャーシをドライバーのグランドと絶縁する必要がある場合、エンコーダーは、小型の電解コンデンサを介して容量接地できます。ノイズが引き続き生じる場合のため、CUI Devicesでは、ノイズの多い環境や長距離ケーブルに最適な、差動ライン・ドライバー付属のバージョンをご用意しています。現在、AMT11、AMT13、AMT31、AMT33シリーズのエンコーダーは、インクリメント出力とコミュテーション出力に対応する、さまざまな差動ライン・ドライバー出力構成で提供されています。
取付けにはネジ使用することを推奨しますが、穴を開けることができない場所にAMTエンコーダーを取付ける場合は、接着剤を使用しても構いません。プラスチック用の接着剤またはエポキシ樹脂であれば十分です。しかし、この方法では、元に戻したり調整したりするのが容易ではないため、実装する際には、じっくり時間をかけて適切な位置調整を確認することをお勧めします。接着テープはどのようなタイプのものであっても使用しないでください。
AMT10またはAMT10Eシリーズエンコーダー:
それぞれのAMT10またはAMT10E エンコーダーは、後部に4位置DIPスイッチがあります。これにより、スイッチをオンに調整するかのように、16の分解能から選択できます。分解能オプションの表については、AMT10シリーズまたはAMT10Eシリーズのデータシートを参照してください。
その他すべてのAMTシリーズエンコーダー:
AMTプログラミング・ケーブルとPCを使用することで、CUI DevicesのAMT Viewpoint™ソフトウェアでは、シリーズに応じて、ユーザーは以下のような仕様を設定することができます:分解能、回転方向、モーターポールのペア、ゼロ位置。必要な分解能がわからない場合は、AMT Viewpointを使用すると、波形プロットと計算されたパルス幅の値を使って決定することができ、これらの値は分解能を選択すると自動的に調整されます。AMTエンコーダーはすべてカスタム注文して、使用可能な任意の分解能にあらかじめ設定することもできます。
エンコーダーがほぼ一定の速度で回転している場合、出力にエラーは発生しません。これは、移動平均として最も良く示されている数値が設計に組み込まれているためです。この平均は、出力の生成に必要なサンプル数を減らすことで安定させることができます。シャフトが回転すると、現在の位置が指定された率でサンプリングされ、速度が毎回生成されます。この流速は、ASICのレジスタに保存され、出力信号の生成に使用されます。エンコーダーが一定の速度で動作するとエラーは発生しませんが、アクセラレーションを導入すると、エンコーダーでサンプリングし、速度を再計算する時間にわずかな遅延が生じます。この遅延によって生じた値は、位置の精度として表され、角度で示されます。ASICで速度の変化を計測すると、前回のエラー値も計測し、その値を使用して、次の補正で補償します。これはすべて非常に高速で行われます。AMTエンコーダーの高い精度は通常、わずか±0.2度です。正確な数値については、エンコーダーのデータシートを参照してください。
いいえ。エンコーダーは、常にマルチターン・カウンターがゼロで起動します。
シングルターン・エンコーダーは、1回転、360°分の位置データを提供し、シャフトが旋回するごとに出力を繰り返します。マルチターン・エンコーダーはもう1回転の位置データを提供しますが、複数回転の数値を測定する追加の「回転」カウンターを持ちます。
アブソリュート・エンコーダーについての詳細情報は、CUI Devicesのブログ記事、「貴社の設計にアブソリュート・エンコーダーが最適となるのはどんな時ですか?」をご覧ください。
はい、いくつかの手順ビデオが公開されています。